My Robot Time (MRT) adalah platform edukasi berbasis robotik yang dirancang untuk anak-anak dan remaja guna meningkatkan pemahaman mereka tentang teknologi, sains, dan rekayasa. Program ini menggabungkan pembelajaran STEM (Science, Technology, Engineering, and Mathematics) melalui perakitan dan pemrograman robot. Dengan pendekatan interaktif, MRT tidak hanya mengajarkan konsep teknologi tetapi juga membangun keterampilan berpikir kritis, kreativitas, dan kerja tim.
Untuk jenis-jenis dari produk my robot time series sendiri ini ada cukup banyak, seperti seri Story, Sensing, Exciting, Game maker kit, MRT 3, MRT 5, MRT-X dan masih banyak yang lainnya, namun dalam topik kali ini kita akan membahas perbandingan dari series MRT 3 dan MRT-X itu sendiri.
2. Perbandingan dari MRT 3 dan MRT-X
Pengertian dari MRT 3
Series My Robot Time 3 adalah series dari produk MRT yang digunakan untuk robot edukasi di level Sekolah Dasar ( SD ) kelas 3 sampai dengan kelas 6. Di MRT 3 ini Program Pengembangan Pendidikan. Seluruh program berfokus pada pengembangan pengetahuan dasar ilmiah, keterampilan robotik, dan teknologi lainnya. Pengembangan keterampilan berpikir kreatif untuk menyelesaikan masalah kompleks dan menciptakan solusi baru.
Fitur Pelatihan
Menantang dan mendorong keterampilan pemecahan masalah serta meningkatkan konsentrasi. Meningkatkan keterampilan kepemimpinan dan komunikasi melalui aktivitas kelompok kecil. Mengikuti kurikulum sains sekolah dasar. Dengan bimbingan guru, tujuan akan dicapai melalui perakitan mandiri untuk menciptakan lingkungan belajar yang baik.”
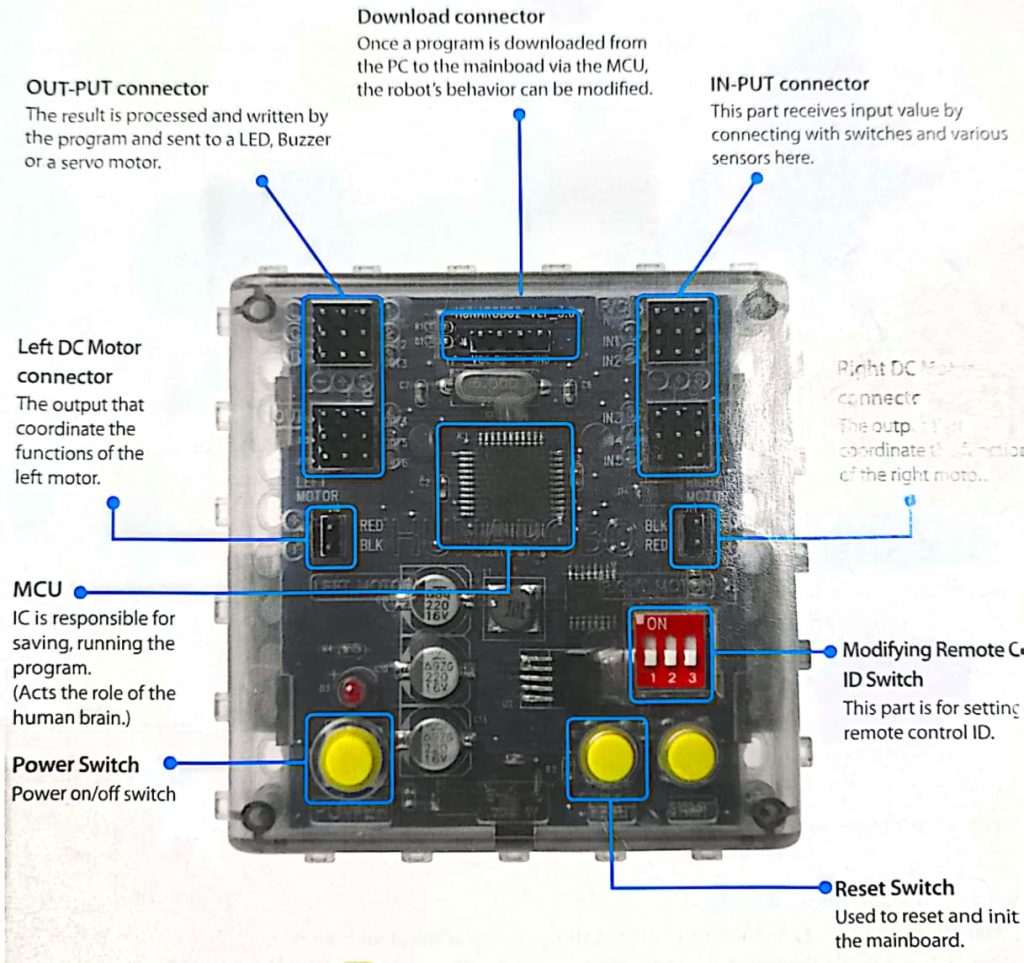
Part Elektronik
1. Kabel Uploader
Digunakan untuk mengupload program yang sudah di coding dari software MRT 3
2. Servo motor
Digunakan sebagai mesin penggerak yang kaku, servo bisa menggerakan objek keatas dan kebawah sejauh 90 derajat
3. RC dan RC Receiver
Remote Control digunakan untuk menggerakan robot secara nirkabel dan RC Receiver digunakan sebagai penerima sinyal dari Remote Control itu sendiri
4. DC Motor
DC Motor digunakan untuk menjalankan roda atau semacamnya karena DC Motor dapat berputar 360 derajat.
5. IR Sensor ( InfraRed )
IR sensor (Infrared Sensor) adalah sensor yang menggunakan cahaya inframerah untuk mendeteksi objek di sekitarnya dan jarak.
6. Touch Sensor
Fungsi touch sensor berfungsi untuk mendeteksi sentuhan fisik atau kontak yang terjadi pada robot. Sensor ini digunakan untuk memberikan respons terhadap interaksi dengan lingkungannya, seperti menghentikan atau mengubah arah gerakan robot ketika ada hambatan atau objek yang disentuh.
7. LED Lamp
LED berfungsi untuk menghasilkan cahaya pada kit MRT ( My Robot Time ) LED lamp hanya memiliki 2 warna yaitu hijau dan merah
8. Buzzer Sensor
buzzer sensor digunakan untuk memberikan umpan balik audio atau peringatan suara terkait status atau kondisi tertentu pada robot.
9. CDS Sensor
Light CDS Sensor (Cadmium Sulfide Sensor) adalah jenis sensor yang digunakan untuk mendeteksi intensitas cahaya di sekitar robot
10. battery case 6 Volt
Battery case pada My Robot Time (MRT) digunakan untuk menyediakan sumber daya tambahan bagi robot atau papan utama MRT.
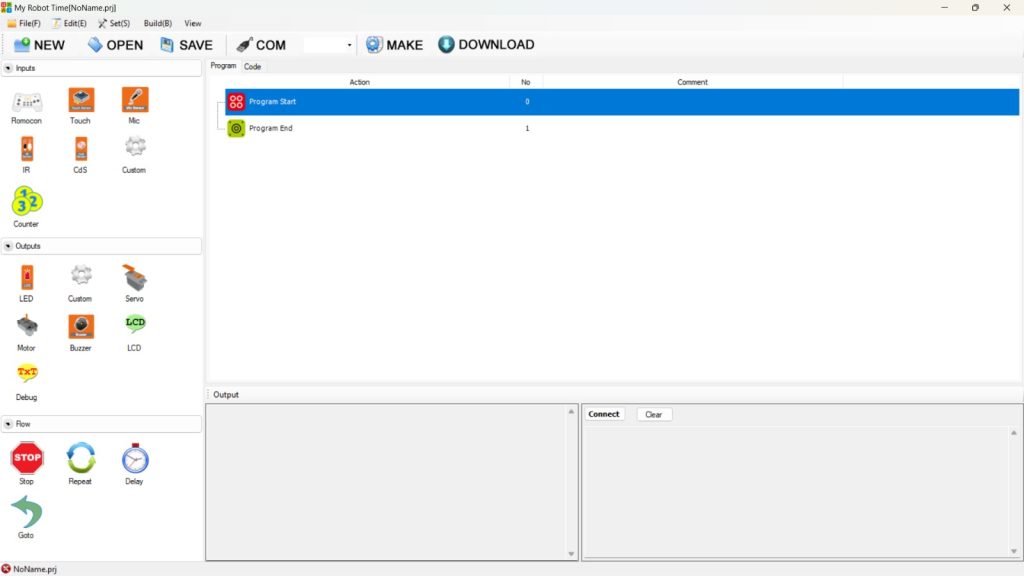
Software MRT 3
My Robot Time 1.2 (MRT 1.2) adalah software yang memudahkan pengguna untuk memprogram robot menggunakan antarmuka visual dan sistem blok kode. Software ini cocok digunakan oleh pemula yang ingin belajar cara mengendalikan robot tanpa perlu menulis kode yang rumit.
Fitur Utama MRT 1.2:
Antarmuka Sederhana: Mudah digunakan dengan sistem drag-and-drop.
Pembuatan Program Visual: Menggunakan blok kode untuk membuat perintah robot.
Kompatibilitas Robot: Mendukung berbagai jenis robot yang dilengkapi sensor dan motor.
Cara Menggunakan MRT 1.2:
Instalasi: Unduh dan instal MRT 1.2 di komputer.
Membuat Program: Pilih dan susun blok kode untuk memberi instruksi pada robot. Setiap blok kode mewakili perintah seperti bergerak, memutar, atau membaca sensor.
Mengkoding Robot: Seret dan gabungkan blok-blok kode untuk membentuk urutan perintah sesuai dengan tujuan robot, seperti mengikuti garis atau menghindari rintangan.
Kirim ke Robot: Setelah program selesai disusun, hubungkan robot ke komputer dan kirim program tersebut untuk dijalankan di robot.
Debugging: Jika ada kesalahan, gunakan fitur debugging untuk memeriksa dan memperbaiki program.
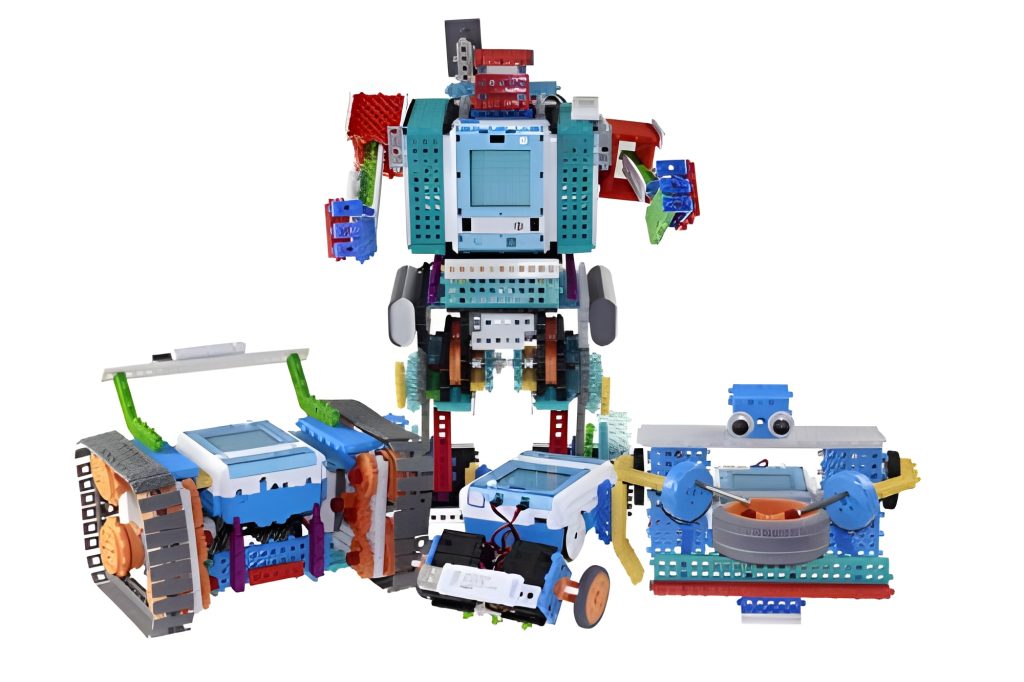
Katalog dari model robot MRT 3
Pengertian MRT-X
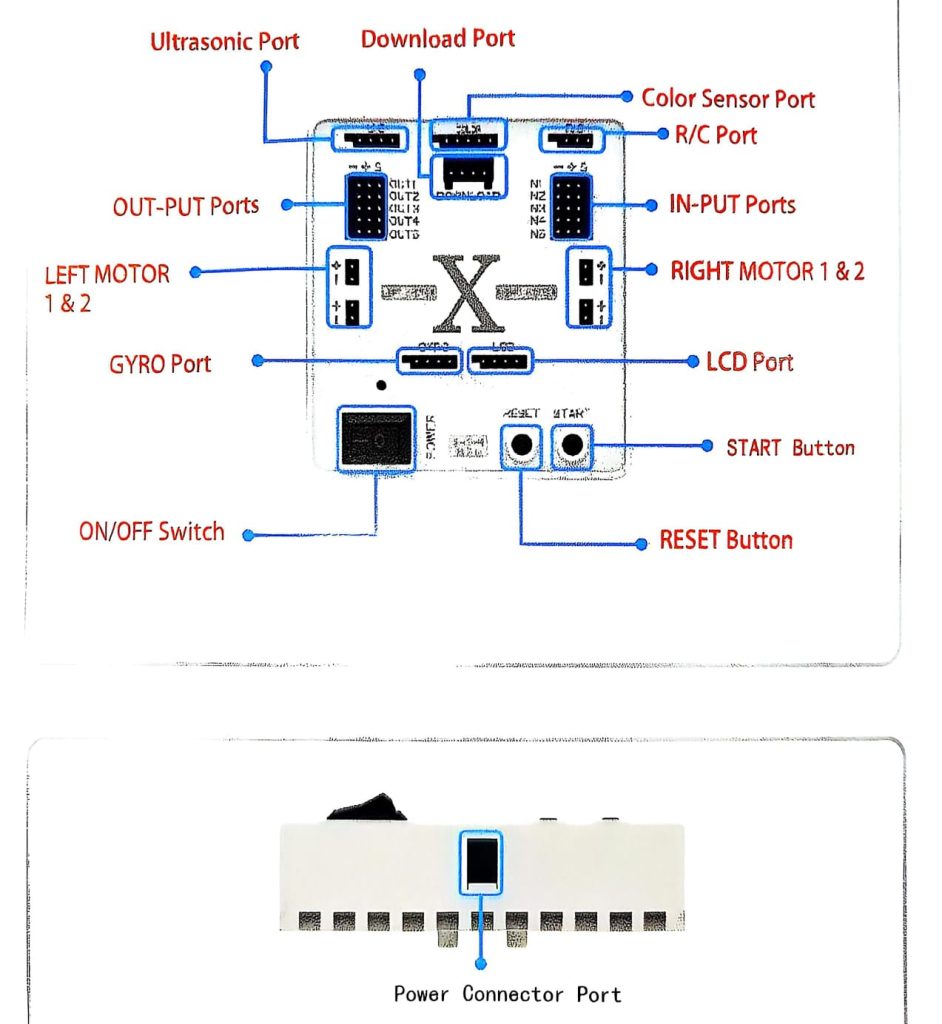
Series My Robot Time-X adalah series dari produk MRT yang digunakan untuk robot edukasi di level Sekolah Menengah pertama maupun menengah atas ( SMP/SMA ). MRT-X adalah compiler GUI yang mendukung pemrograman grafis dan kode. Pemrograman grafis memudahkan pemahaman dan pembelajaran, sementara pemrograman kode memenuhi kebutuhan pemrograman yang lebih canggih. Program yang dibuat mudah diunduh ke papan utama MRTX, membuat pembelajaran menjadi lebih menyenangkan.
Fitur Pelatihan
Menantang dan mendorong keterampilan pemecahan masalah serta meningkatkan konsentrasi. Meningkatkan keterampilan kepemimpinan dan komunikasi melalui aktivitas kelompok kecil. Mengikuti kurikulum sains sekolah dasar. Dengan bimbingan guru, tujuan akan dicapai melalui perakitan mandiri untuk menciptakan lingkungan belajar yang baik.”
Part Elektronik
1. Kabel Uploader
Digunakan untuk mengupload program yang sudah di coding dari software MRT-x
2. Servo motor
Digunakan sebagai mesin penggerak yang kaku, servo bisa menggerakan objek keatas dan kebawah sejauh 90 derajat
3. RC dan RC Receiver
Remote Control digunakan untuk menggerakan robot secara nirkabel dan RC Receiver digunakan sebagai penerima sinyal dari Remote Control itu sendiri
4. DC Motor
DC Motor digunakan untuk menjalankan roda atau semacamnya karena DC Motor dapat berputar 360 derajat. Speed dari dc motor yang dipakai dapat mencapai kecepatan 20
5. IR Sensor ( InfraRed )
IR sensor (Infrared Sensor) adalah sensor yang menggunakan cahaya inframerah untuk mendeteksi objek di sekitarnya dan jarak.
6. Touch Sensor
Fungsi touch sensor berfungsi untuk mendeteksi sentuhan fisik atau kontak yang terjadi pada robot. Sensor ini digunakan untuk memberikan respons terhadap interaksi dengan lingkungannya, seperti menghentikan atau mengubah arah gerakan robot ketika ada hambatan atau objek yang disentuh.
7. LED Lamp.
LED berfungsi untuk menghasilkan cahaya pada kit MRT ( My Robot Time ) LED lamp hanya memiliki 2 warna yaitu hijau dan merah.
8. Buzzer Sensor
buzzer sensor digunakan untuk memberikan umpan balik audio atau peringatan suara terkait status atau kondisi tertentu pada robot.
9. CDS Sensor
Light CDS Sensor (Cadmium Sulfide Sensor) adalah jenis sensor yang digunakan untuk mendeteksi intensitas cahaya di sekitar robot
10. battery case 9 Volt
Battery case pada My Robot Time (MRT) digunakan untuk menyediakan sumber daya tambahan bagi robot atau papan utama MRT.
11. Ultrasonic sensor
digunakan untuk mendeteksi jarak dan mengukur kedekatan objek di sekitar robot
12. Mic sensor
Microphone (MIC) sensor pada produk My Robot Time (MRT) digunakan untuk mendeteksi suara di sekitar robot.
13. extension cable
Extension cable adalah kabel tambahan yang digunakan untuk memperpanjang jangkauan kabel utama. Dengan extension cable, Anda dapat memperluas panjang kabel yang menghubungkan perangkat elektronik atau komponen lainnya
14. gyro sensor
Gyro sensor pada produk My Robot Time (MRT) berfungsi untuk mengukur dan mendeteksi perubahan orientasi atau pergerakan sudut robot
15. color sensor
Color sensor pada produk My Robot Time (MRT) digunakan untuk mendeteksi dan mengenali warna di sekitar robot
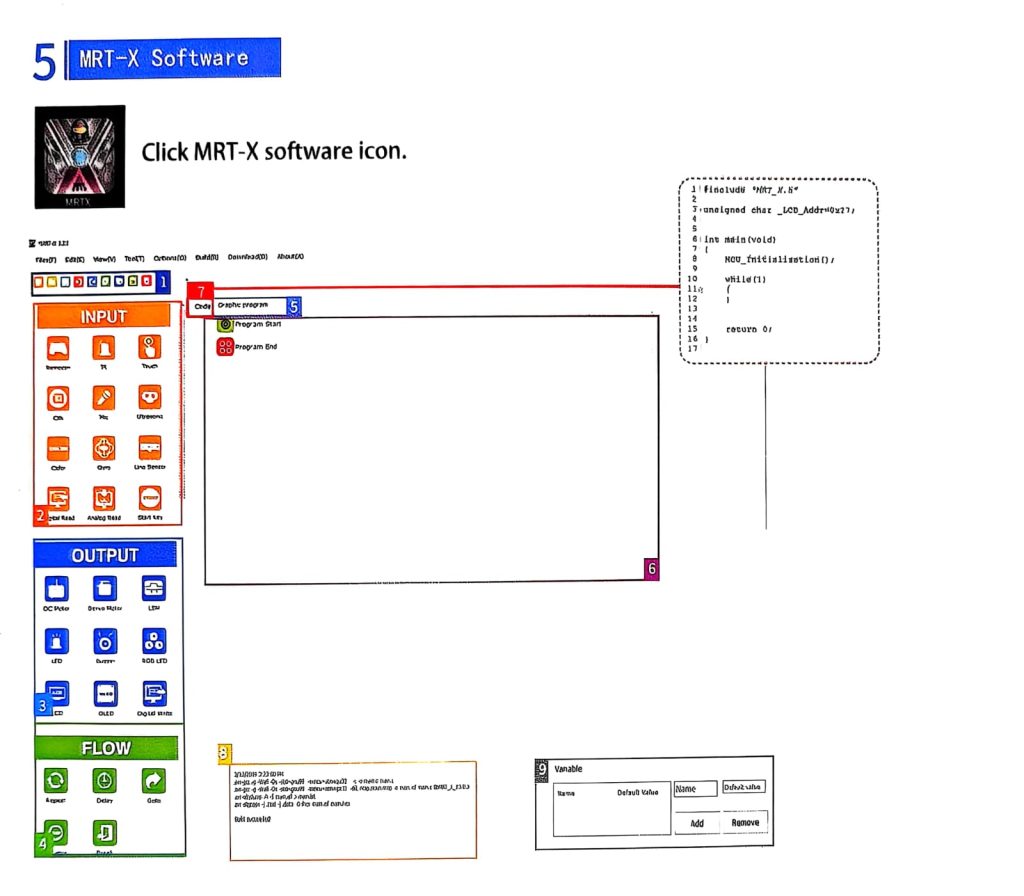
Software MRT-X
My Robot Time X (MRT-X) adalah perangkat lunak yang digunakan untuk pemrograman dan pengelolaan robot, terutama dalam konteks pendidikan robotika atau proyek otomatisasi. MRT-X memungkinkan pengguna untuk membuat program yang mengontrol robot, serta memonitor dan mengevaluasi kinerjanya.
Cara Penggunaan:
Instalasi: Unduh dan instal software MRT-X dari sumber terpercaya.
Koneksi Robot: Hubungkan robot ke komputer via USB atau nirkabel.
Pemrograman: Gunakan antarmuka grafis atau kode (Python, C++, dll) untuk membuat program.
Pengujian dan Debugging: Uji robot dan lakukan debugging jika diperlukan.
Eksekusi: Jalankan program untuk menggerakkan robot sesuai perintah.
Fitur Utama:
Antarmuka Pemrograman Grafis: Untuk pemula, memungkinkan pemrograman dengan blok perintah.
Editor Kode: Untuk pengguna berpengalaman, mendukung bahasa pemrograman seperti Python dan C++.
Simulasi Robot: Menguji program tanpa robot fisik.
Kontrol Sensor dan Aktuator: Mendukung sensor (jarak, suhu, cahaya) dan motor untuk interaksi robot.
Pengujian dan Debugging: Memeriksa dan memperbaiki program.
Integrasi Hardware: Mendukung platform seperti Arduino dan Raspberry Pi.
Pemrograman Berbasis Waktu: Mengatur pengoperasian robot berdasarkan waktu.
Kompatibilitas Platform: Bekerja pada Windows, Mac OS, dan Linux.
Penyimpanan dan Backup: Menyimpan program dan data untuk menghindari kehilangan.
MRT-X sangat berguna untuk belajar pemrograman robot sambil berinteraksi langsung dengan robot fisik atau melalui simulasi, memberikan pengalaman praktis yang berharga.
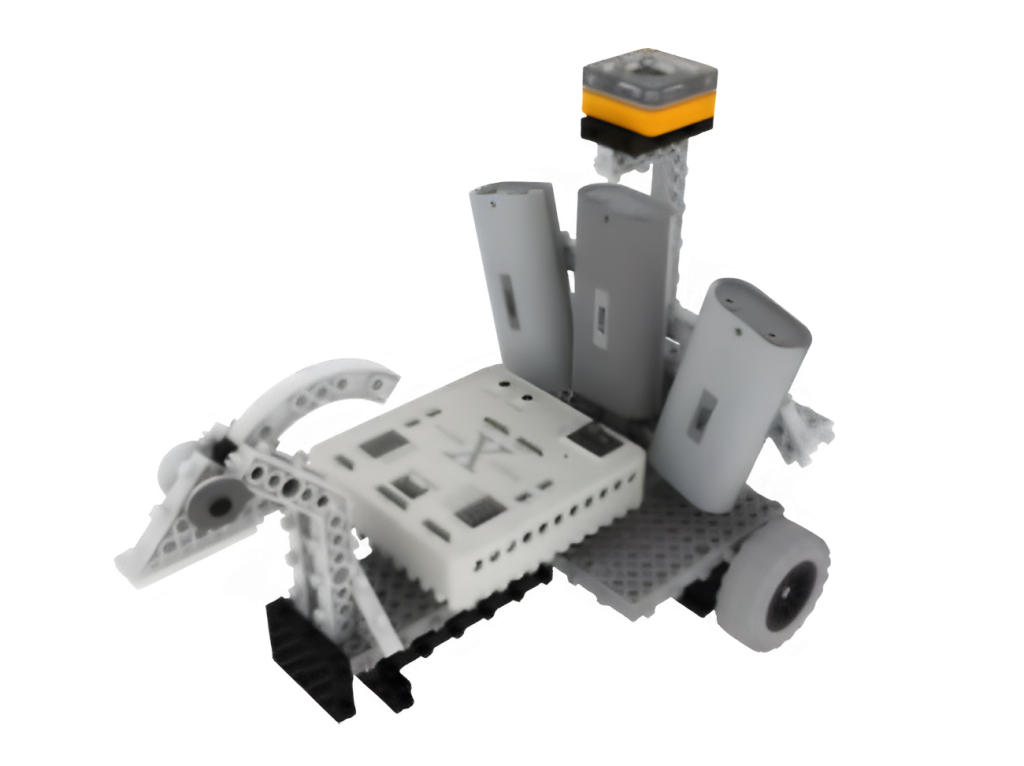
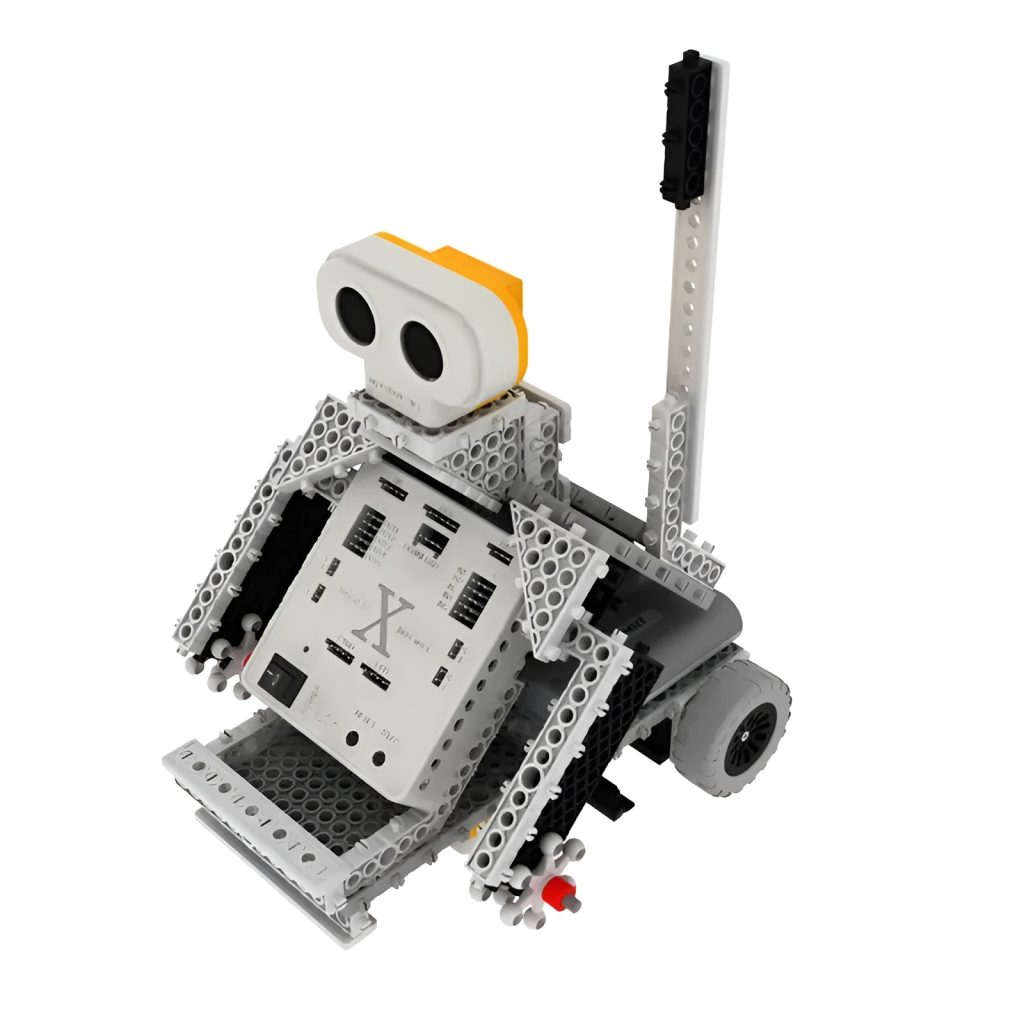
Katalog dari model robot MRT-X
3. Kesimpulan
Jadi setelah membaca perbandingan tersebut antara MRT 3 dan MRT-X dapat dilihat beberapa keunggulan yang dimiliki MRT-X dibanding MRT 3, seperti DC motor yang dimiliki oleh MRT-X dapat mencapai kecepatan 20 sedangkan DC motor dari MRT 3 hanya 10. Lalu software yang dipakai di MRT-X juga lebih advance karena dapat menambahkan output yang ada diluar aplikasi.



")